solidwork机械臂建模,实现三个自由度的变化
”solidwork机械臂 solidwork solidwork手臂 机械臂 机械臂建模“ 的搜索结果
四自由度机械臂solidworks模型
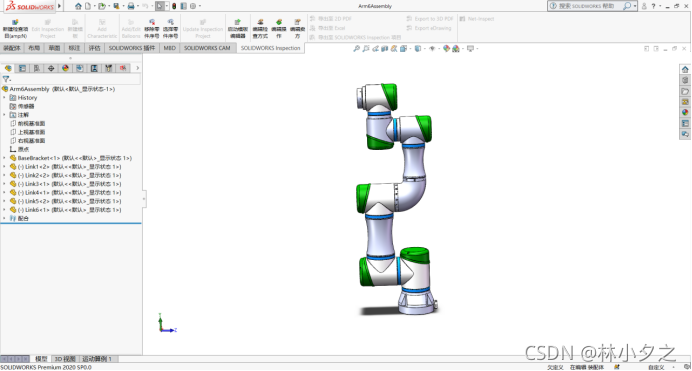
六轴机械臂模型solidworks
六自由度机械臂solidworks三维模型.zip
Labview与Solidworks-机械臂的仿真与控制(包括”经典案例:labview机械臂仿真控制“和”自制案例:机械臂控制程序(含SW源文件)“)。 关于Labview-3D虚拟平台(Labview导入Solidworks模型进行仿真与控制)零基础...
11.机械臂6.zip非标自动化设备solidworks3D图纸机械设计素材资料 11.机械臂6.zip非标自动化设备solidworks3D图纸机械设计素材资料 11.机械臂6.zip非标自动化设备solidworks3D图纸机械设计素材资料 11.机械臂6.zip...
4自由度机械臂solidworks模型
五自由度机械臂solidworks三维模型
ABB机械臂 solidworks
机器人车机械臂3D图纸 SolidWork2012设计
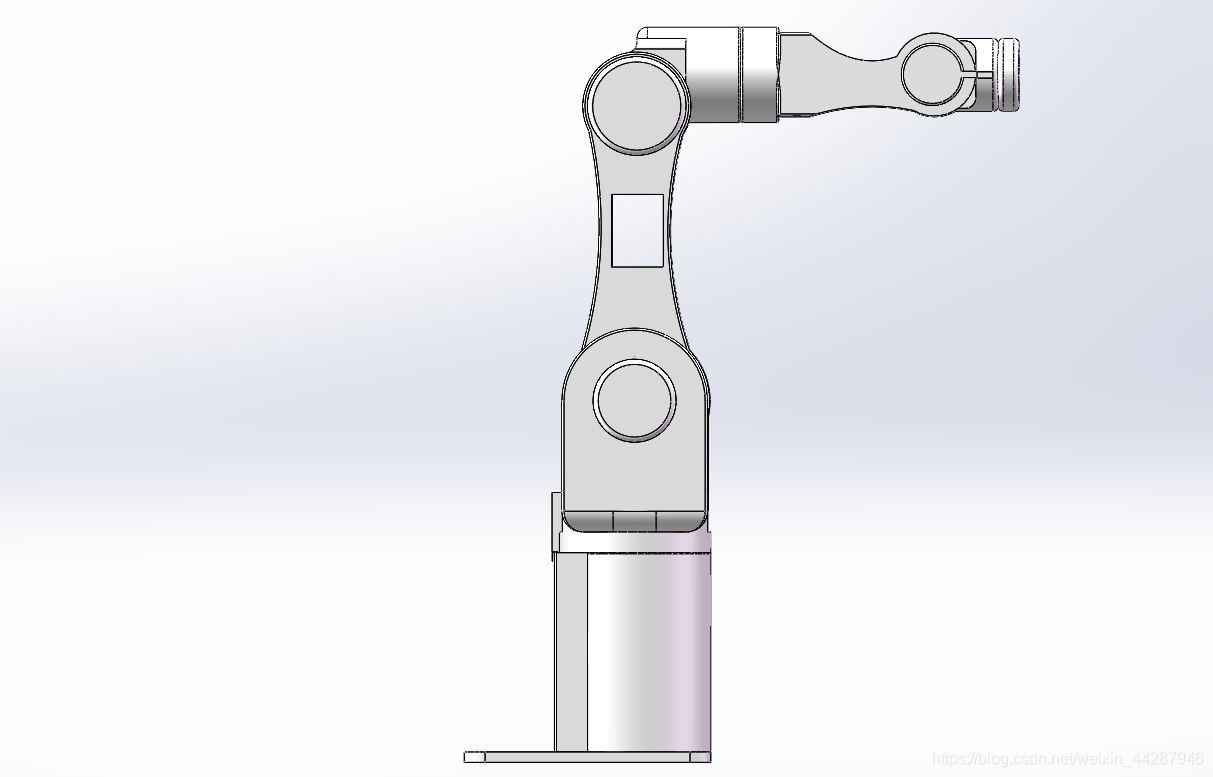
用SolidWork做的工业机械臂,可以理解工业机械臂的大概结构。学习结构与自动控制的可以看看。
然后,在solidwork中使用各种建模工具,可以依次绘制出机械手臂的各个关键零件,如机械臂的基座、臂体、转动关节、手腕模块等。 在绘图时,需要注意机械手臂各部分的尺寸和适配性。此外,应考虑到机械手臂的力学...
solidwork兼容solidedge的机械臂3D图纸,具有详细零件,可用打印机打印出模型
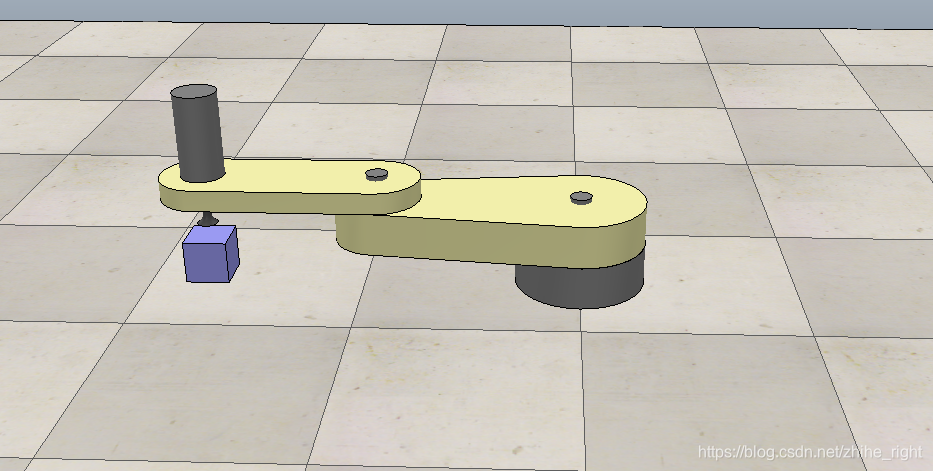
哈哈哈,作为嵌入式软件工程师,最想做的事就是通过自己的能力一个人做出机械臂,然后让它动起来。今天用solidworks画了一个简单的四自由度机械臂,希望是自己制作机械臂迈出的第一步。哈哈哈,需要文件的可以私聊我...

1. 创建机械臂的基础框架:根据设计要求,在 SolidWorks 中创建一个空的装配体,然后添加机械臂的基础框架,包括机械臂底座、关节和连杆等。 2. 添加电机和减速器:根据机械臂的运动要求,在适当的位置添加电机和...
GAZEBO仿真里常常使用的模型,一个机械臂,一个是小车。这里针对机械臂的urdf文件说明,urdf文件使用solidworks导出,参考 solidWorks导出URDF文件,建议使用最新版导出插件,旧版本导出有错误,新版本已经改过来。....
Qt导入Solidworks机械臂模型(3D模型),控制各关节运动
第三章作业 第一题 熟悉各参数的含义 对颜色的修改: <material name="Skyblue"> <color rgba="0.095 1.58 1.60 1"/> </material>...xacro:property name=“link0_radius” value=“0.1” />...
文章目录1.solidwork 模型导出为URDF文件2.VREP导入URDF文件3.编写Lua程序控制机器人 1.solidwork 模型导出为URDF文件 V-REP(CoppeliaSim)可以导入obj、dxf、ply、stl、dae、URDF文件,这里介绍导入URDF文件。 在此...
用SolidWork做的工业机械臂,可以理解工业机械臂的大概结构。学习结构与自动控制的可以看看。 相关下载链接://download.csdn.net/download/funlunatic/1882948?utm_source=bbsseo
URDF(Universal Robot Description Format)...到目前为止,本文的主要内容有两个:(1)将solidworks里绘制的三连杆机械臂的三维模型转化为URDF文件,并在rviz中打开;(2)在rviz中测试该模型的逆运动学。一, 将S
在ROS(Kinetic) 中利用URDF 编写 Denso 机器人的一个简单模型 Denso的URDF 模型主要是参照图1过来的,然后根据实际的情况进行了相应的修改。 ...在写模型过程中遇到的问题,在RVIZ 中的坐标系 红色为X,绿色为Y...
机械臂又称为操作臂。 机械臂知识是机器人领域研究得最早,最透彻得部分。用机械臂知识作为机器人学得入门是一个不错得选择。 机械臂主要包括以下几部分知识:刚体的描述、运动学<包含正运动学、逆运动学>、...
经过上面的操作,舵机就基本在我们的掌控之中了。下一步就可以通过串口建立电脑与stm32的通讯,从而实现电脑上发送相应的指令控制任意舵机的转动角度。


推荐文章
- Python Django 版本对应表以及Mysql对应版本_django版本和mysql对应关系-程序员宅基地
- Maven的pom.xml文件结构之基本配置packaging和多模块聚合结构_pom <packaging>-程序员宅基地
- Composer 原理(二) -- 小丑_composer repositories-程序员宅基地
- W5500+F4官网TCPClient代码出现IP读取有问题,乱码问题_w5500 ping 网络助手 乱码 send(sock_tcps,tcp_server_buff,-程序员宅基地
- Python 攻克移动开发失败!_beeware-程序员宅基地
- Swift4.0_Timer 的基本使用_swift timer 暂停-程序员宅基地
- 元素三大等待-程序员宅基地
- Java软件工程师职位分析_java岗位分析-程序员宅基地
- Java:Unreachable code的解决方法_java unreachable code-程序员宅基地
- 标签data-*自定义属性值和根据data属性值查找对应标签_如何根据data-*属性获取对应的标签对象-程序员宅基地